
单回路控制系统设计,单回路控制系统设计概述
时间:2024-12-03 来源:网络 人气:
单回路控制系统设计概述
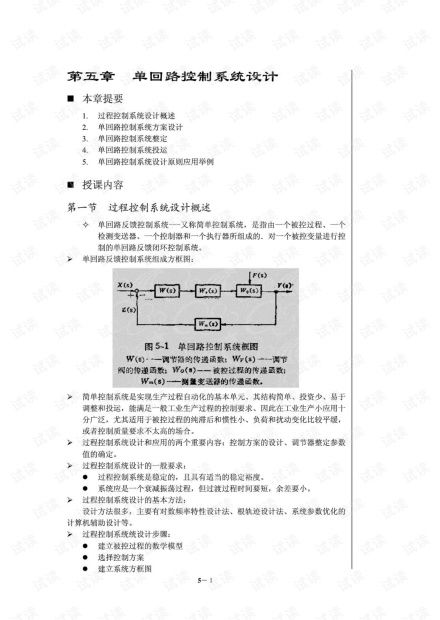
单回路控制系统是工业自动化领域中最为基础和常见的控制方式之一。它通过一个闭环回路,实现对被控对象的精确控制。本文将详细介绍单回路控制系统的设计过程,包括系统组成、设计原则、控制器选择以及参数整定等方面。
单回路控制系统组成
单回路控制系统主要由以下几个部分组成:
被控对象:被控对象是控制系统中的核心,它可以是任何需要控制的物理量,如温度、压力、流量等。
传感器:传感器用于检测被控对象的实际值,并将其转换为电信号输出。
控制器:控制器根据设定值与实际值的偏差,计算出控制信号,以实现对被控对象的调节。
执行器:执行器根据控制器的输出信号,对被控对象进行调节,如调节阀门的开度、加热器的功率等。
单回路控制系统设计原则
单回路控制系统设计应遵循以下原则:
稳定性原则:保证系统在受到扰动后能够迅速恢复到稳定状态。
准确性原则:保证系统输出值与设定值之间的误差尽可能小。
快速性原则:保证系统在受到扰动后能够迅速响应,减少超调量。
可靠性原则:保证系统在长时间运行过程中,性能稳定,故障率低。
控制器选择
控制器是单回路控制系统的核心部件,其选择对系统性能有重要影响。常见的控制器有:
比例控制器(P):根据偏差大小进行调节,但无法消除稳态误差。
积分控制器(I):根据偏差的积分进行调节,可以消除稳态误差,但响应速度较慢。
微分控制器(D):根据偏差的变化率进行调节,可以提高系统的快速性和稳定性,但容易引起振荡。
比例积分微分控制器(PID):结合P、I、D三种控制作用,可以兼顾系统的快速性、稳定性和准确性。
参数整定
控制器参数整定是单回路控制系统设计的关键环节,直接影响系统性能。常见的参数整定方法有:
经验法:根据工程经验,对控制器参数进行初步设定。
衰减曲线法:通过观察系统响应曲线,确定控制器参数。
Ziegler-Nichols方法:根据系统响应曲线,确定控制器参数。
计算机辅助整定:利用计算机软件,对控制器参数进行优化。
单回路控制系统设计实例
以下是一个单回路控制系统设计的实例:
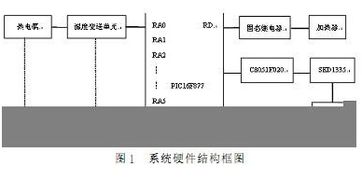
被控对象:某工厂的加热炉温度控制系统。
传感器:热电偶。
控制器:PID控制器。
执行器:加热器。
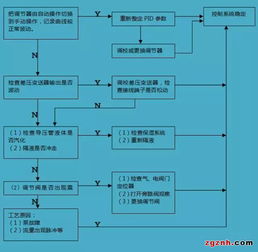
设计步骤:
确定被控对象的动态特性,如时间常数、传递函数等。
选择合适的控制器类型,如PID控制器。
根据被控对象的动态特性和控制器类型,确定控制器参数。
搭建控制系统,进行实验验证。
根据实验结果,对控制器参数进行调整,优化系统性能。
单回路控制系统设计是工业自动化领域的基础知识,掌握其设计原则、控制器选择和参数整定方法对于实际工程应用具有重要意义。本文从系统组成、设计原则、控制器选择和参数整定等方面对单回路控制系统设计进行了详细阐述,旨在为读者提供有益的参考。
- 单回路控制系统
- 控制系统设计
- 被控对象
- 传感器
- 控制器
- 执行器
- 参数整定
相关推荐


教程资讯
教程资讯排行

系统教程
- 1 安卓操作系统怎么下载,基于安卓操作系统的原生App在线生成源码下载指南
- 2 安卓操作系统怎么下载,基于安卓操作系统的原生App在线生成源码下载指南
- 3 安卓系统低能用的应用,AccessibilityService框架助力无障碍体验创新
- 4 安卓系统低能用的应用,AccessibilityService框架助力无障碍体验创新
- 5 安卓系统 录音文件夹,揭秘存储与管理的奥秘
- 6 安卓系统 录音文件夹,揭秘存储与管理的奥秘
- 7 王者荣耀微信区安卓系统,共享游戏乐趣
- 8 王者荣耀微信区安卓系统,共享游戏乐趣
- 9 苹果安卓系统故障维修,全面解析与实战技巧
- 10 苹果安卓系统故障维修,全面解析与实战技巧








